|
Jiri Sedlar I'm a research scientist at the Czech Institute of Informatics, Robotics and Cybernetics (CIIRC), Czech Technical University in Prague, in the IMPACT group led by Josef Sivic. I did my PhD at Charles University / Czech Academy of Sciences in Prague, where I was advised by Jan Flusser, followed by postdoc stays at Flinders University in Adelaide, Australia, and Mayo Clinic in Rochester, MN, USA. Email / Google Scholar / arXiv / LinkedIn |

|
ResearchI'm interested in machine learning, protein engineering, robotics, computer vision, and image processing. |
|
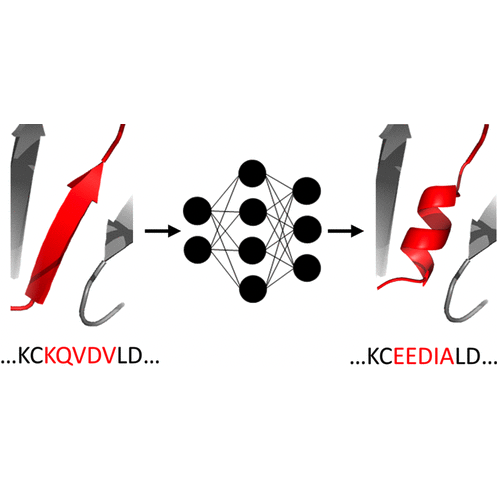
Learning to design protein-protein interactions with enhanced generalization
Anton Bushuiev, Roman Bushuiev, Petr Kouba, Anatolii Filkin, Marketa Gabrielova, Michal Gabriel, Jiri Sedlar, Tomas Pluskal, Jiri Damborsky, Stanislav Mazurenko, Josef Sivic International Conference on Learning Representations (ICLR), 2024 PDF / code / dataset / webserver Introducing a large dataset of protein-protein interfaces and a model for predicting the change in binding affinity of two protein structures upon mutation (ddG prediction). |
|
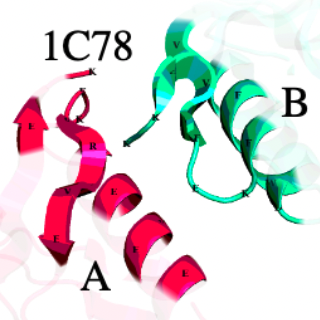
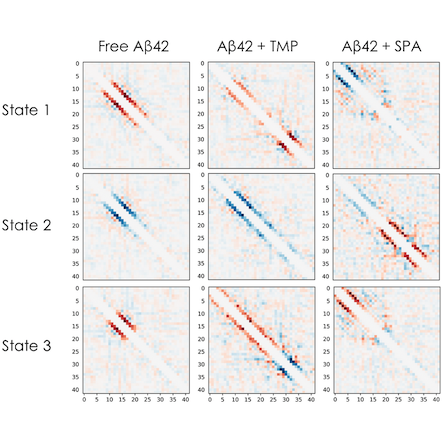
Effects of Alzheimer’s Disease Drug Candidates on Disordered Aβ42 Dissected by Comparative Markov State Analysis (CoVAMPnet)
Sergio M. Marques, Petr Kouba, Anthony Legrand, Jiri Sedlar, Lucas Disson, Joan Planas-Iglesias, Zainab Sanusi, Antonin Kunka, Jiri Damborsky, Tomas Pajdla, Zbynek Prokop, Stanislav Mazurenko, Josef Sivic, David Bednar In submission bioRxiv / project page / code The introduced CoVAMPnet method allows interpretation and comparison of Markov state models of molecular dynamics, as demonstrated on a case study comparing the dynamics of three different systems of Aβ42 peptide. |
|
Machine Learning-Guided Protein Engineering
Petr Kouba, Pavel Kohout, Faraneh Haddadi, Anton Bushuiev, Raman Samusevich, Jiri Sedlar, Jiri Damborsky, Tomas Pluskal, Josef Sivic, Stanislav Mazurenko ACS Catalysis, 2023 PDF / BibTeX IF: 12.9 A perspective and survey on challenges in protein engineering and progress enabled by machine learning. |
|
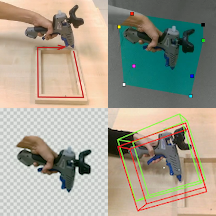
Imitrob: Imitation Learning Dataset for Training and Evaluating 6D Object Pose Estimators
Jiri Sedlar, Karla Stepanova, Radoslav Skoviera, Jan Behrens, Matus Tuna, Gabriela Sejnova, Josef Sivic, Robert Babuska IEEE Robotics and Automation Letters (RA-L), 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 PDF / BibTeX / project page / code / dataset IF: 5.2 A dataset for training and evaluating methods for 6D pose estimation of hand-held tools in task demonstrations captured by a standard RGB camera. |
|
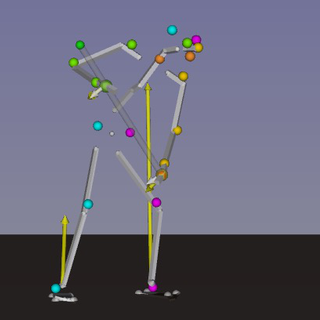
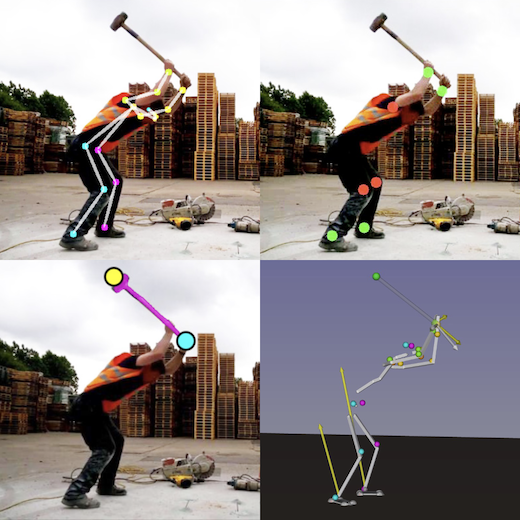
Estimating 3D Motion and Forces of Human-Object Interactions from Internet Videos
Zongmian Li, Jiri Sedlar, Justin Carpentier, Ivan Laptev, Nicolas Mansard, Josef Sivic International Journal of Computer Vision (IJCV), 2022 PDF / BibTeX / project page / code IF: 19.5 A visual recognition system that takes as input video frames together with a simple object model, and outputs a 3D motion of the person and the object, as well as contact forces and torques actuated by the human limbs. |
|
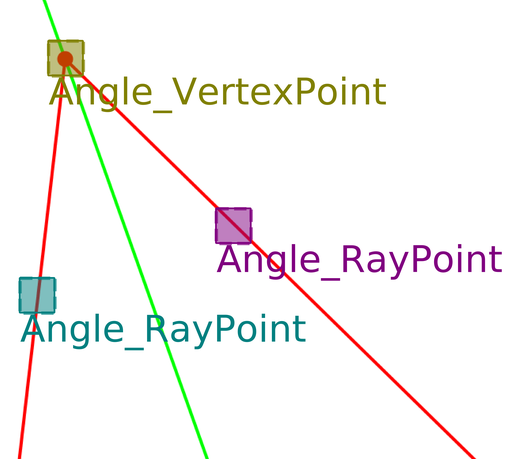
Learning to solve geometric construction problems from images
Jaroslav Macke, Jiri Sedlar, Miroslav Olsak, Josef Urban, Josef Sivic Conference on Intelligent Computer Mathematics (CICM), 2021 PDF / BibTeX / project page / code A purely image-based method for finding ruler and compass constructions in the Euclidea geometric game. |

|
Is This the Right Place? Geometric-Semantic Pose Verification for Indoor Visual Localization
Hajime Taira, Ignacio Rocco, Jiri Sedlar, Masatoshi Okutomi, Josef Sivic, Tomas Pajdla, Torsten Sattler, Akihiko Torii IEEE/CVF International Conference on Computer Vision (ICCV), 2019 PDF / BibTeX / project page A new pose verification approach combining appearance, geometry and semantics to improve large-scale indoor camera localization. |
|
Estimating 3D Motion and Forces of Person-Object Interactions From Monocular Video
Zongmian Li, Jiri Sedlar, Justin Carpentier, Ivan Laptev, Nicolas Mansard, Josef Sivic IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019 PDF / BibTeX / project page / code Best paper finalist (top 1% from all CVPR 2019 submissions) Introducing a new method to automatically reconstruct the 3D motion of a person interacting with an object from a single RGB video. |
|
This page is using the design provided by Jon Barron. |